
任赜宇
博士生 意大利技术研究院 (iit)
意大利技术研究院(Italian Institute of Technology)先进机器人(Advanced Robotics)部门博士生,本科毕业于浙江大学机械电子工程。现主要从事人形机器人欠驱动机械手、串联弹性驱动器(SEA)、平行弹性驱动器(PEA)以及基于SEA和PEA的弹性储能弹跳单腿的机电设计以及相关控制的研究,研究内容多次被ICRA和IROS收录,并担任相关领域审稿人。曾为机器人世界杯小型组(RoboCup SSL)浙江大学熊蓉教授团队ZJUNlict成员,获得2014年机器人世界杯小型组世界冠军、2013年伊朗公开赛亚军以及2015年机器人世界杯小型组季军。
-
3
课程 -
8
文章

面向场地(腿足)机器人的增强型物理交互躯体的设计与应用

串联弹性驱动器(SEA)的结构及性能分析
课程主要介绍串联弹性驱动器(SEA)的定义、结构以及工作原理,并比较了常见的腿足式机器人驱动器的优劣。
腿足式机器人(双足&四足)关节驱动器选型以及结构设计介绍
本次课程将结合国内外实际机器人的运动性能分析和对比,介绍常见腿足式机器人的驱动器类型和特性; 并通过iit的Walkman Plus为例去介绍一种当前较优的双足机器人腿部传动结构和驱动器排布设计;同时以讲师今年ICRA的内容,去介绍一种基于PEA、以提高能量效率为目的的单腿设计方案;接着以iit的Treerobotics为例介绍一种SEA的结构设计方案和参数优化;最终在KIT Tamim工作的基础上,汇总当前常见的商业和科研驱动器并分析其性能优劣。
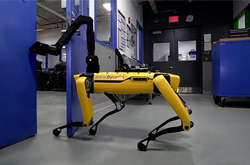
Spotmini最新Demo: Hey Buddy, Can You Give Me a Hand?
看波士顿动力机器人Spotmini如何"手脚并用"成功打开了弹簧防火门。

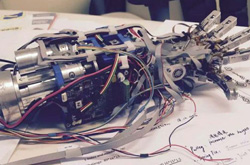
开篇:机械手设计挑战——仿人机器人设计领域上的高峰
本文主要从高自由度的灵巧性,高抓重比的鲁棒性,全覆盖性高灵敏度的传感性,传动的可靠与机构的环境顺从性以及机电系统的高度集成性等5个方面来谈谈传统机械手在设计上的不足。

关于双足人型机器人——六自由度机械腿常见结构设计与比较
本文是一篇以举实例为主、容易阅读的图文并茂的科普文。
机械设计的巧妙可以简化相应的控制系统吗?(二)
作者认为机械设计的巧妙可以简化相应的控制系统,且机电系统的复杂度应该往电气和上层的控制去堆,机械系统要做的越简单可靠越好。

对于动态腿足式机器人的驱动性能挑战及讨论(Actuator Performance Challenge for Dynamic Leg Robots)
本文对目前学术界腿足式机器人常见的驱动器方案进行性能介绍与对比,并探讨未来的驱动器发展方向。

为什么我们在机器人运动控制中一直在强调力控?
先讲述力控的应用背景,然后通过力反馈测量、无力/力矩传感器的力控、位置控制&力/力矩控制等技术的专业分析,阐述了机器人运动控制一直强调力控的原因。
经典SEA线性动力学模型及其简化与力矩求导
本文一步一步讲解线性动力学模型的建立、模型的简化以及力矩求导公式的推导,让之前没有了解过SEA的你,快速入门。

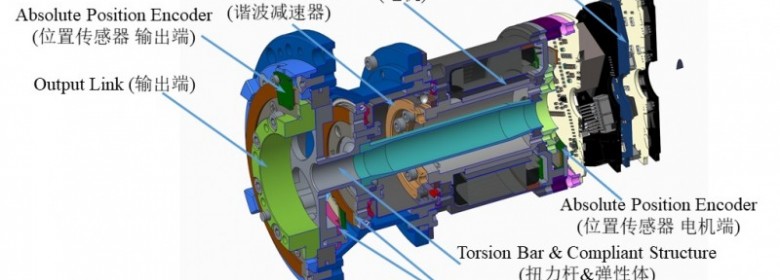
一种带力矩、位置传感器的紧凑人型机器人SEA驱动器(带谐波减速器)机械设计方案
本文介绍一种带力矩、位置传感器的紧凑人型机器人SEA驱动器(带谐波减速器)机械设计方案,是任赜宇博士所在研究所(Istituto Italiano Di Technologia)研究的技术成果。

