

带头人物
张晓辉,博士,毕业于中国科学院沈阳计算技术研究所。
擅长面向数字化控制系统的运动控制器软件结构设计和高速高精运动控制算法的研发。
作为运动控制器和运动控制算法技术骨干先后参与了“高档数控机床与基础制造装备”国家科技重大专项课题:“总线式全数字高档数控装置”、“基于国产‘龙芯’CPU芯片的高档数控装置”、“数控系统高速高精复合控制技术创新平台建设”,以及中国科学院知识创新工程重要方向性项目“基于数学机械化方法的高档数控系统研制”。
先后发表论文20余篇,获得授权发明专利10余项。
现为宁波海天驱动有限公司运动控制研发部主任,负责海天驱动机器人控制器、通用PMC控制器,以及伺服节能液压专用控制器软硬件平台的全自主研发。
机器人控制系统:
以国际先进运动控制系统为标杆,完成了桁架机械手控制器和多关节机器人控制器的全自主研发,并已批量应用于客户。
硬件平台采用基于工业实时以太网的多CPU架构
软件平台采用CNC与OpenPLC相结合的架构方式
集运动控制、PLC控制和网络控制于一体
既可以发挥出系统强大的运动控制特性,又可以体现出系统的开放性和通用性
1、机器人控制系统适用场合
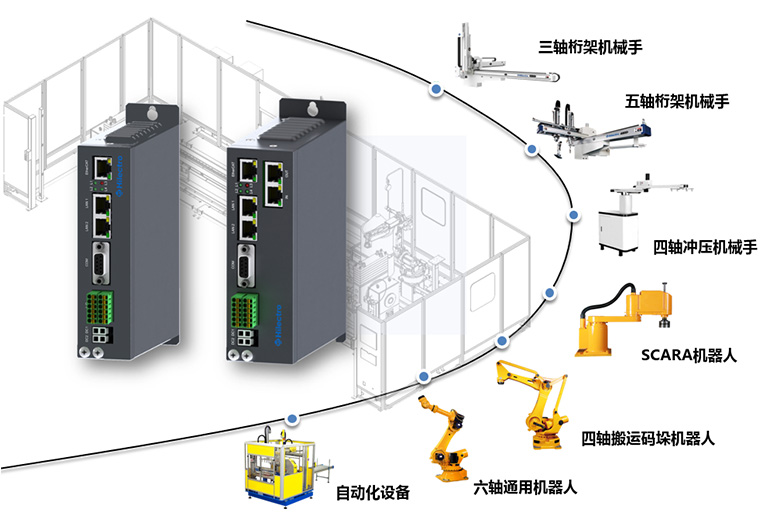
2、桁架机械手解决方案

3、SCARA机器人解决方案

4、六关节机器人解决方案

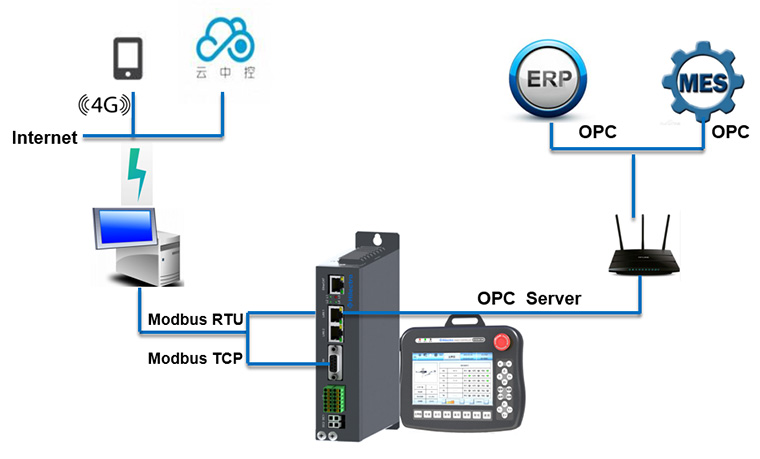
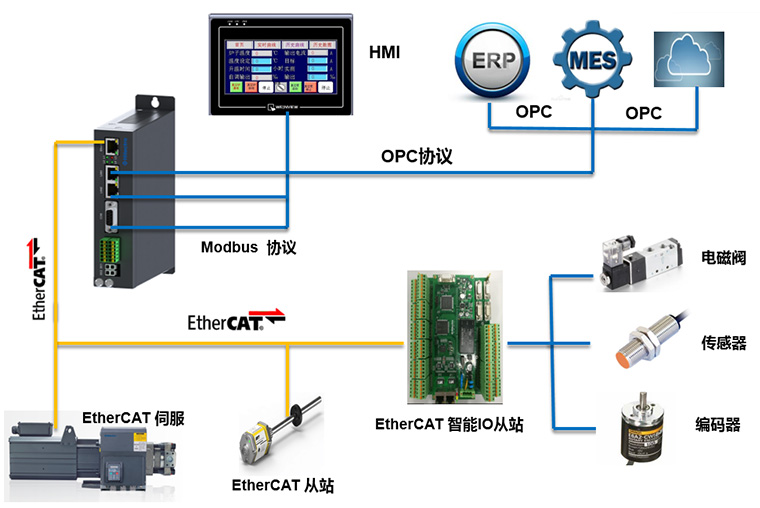
5、工业4.0解决方案
伺服节能液压专用控制系统:
以市场需求为导向,完成了符合IEC61131-3标准的EtherCAT总线式伺服节能液压专用控制系统的全自主研发。
符合PLCopen标准Part1和Part2运动功能块
具备液压控制专用功能,如位置控制、速度控制、压力控制,以及压力位置混合控制等功能
具备液压控制专用功能,如位置控制、速度控制、压力控制,以及压力位置混合控制等功能
位置控制精度可达0.001mm
运动控制核心算法的研发:
以中国科学院知识创新工程重要方向性项目“基于数学机械化方法的高档数控系统研制”和“高档数控机床与基础制造装备”国家科技重大专项为背景,完成了适用于高速高精加工的运动轨迹控制器及其相关算法的研发,并已批量应用于相关数控系统产品中。
设计开发的小线段相关控制算法,在保证加工精度和加工质量的条件下,加工效率可提高30%以上。
设计开发的NURBS曲线插补器和算法,解决了NURBS曲线代码解释和轨迹插补等核心技术问题,使其具备了实用价值,并且在同等加工条件下,代码量降低50%以上,加工效率提高30%以上。


| 三轴加工结果对比 | ||||||
| 采用的方法 | X轴状态 (振动情况) |
Y轴状态 振动情况) |
Z轴状态 (振动情况) |
加工时间 (s) |
效率提升(%) | |
| 现有算法1 | 现有算法2 | |||||
| 现有算法1 | 无振动 | 剧烈振动 | 轻微振动 | 7477 | ||
| 现有算法2 | 无振动 | 轻微振动 | 轻微振动 | 4610 | 38.34 | |
| 自主算法 | 无振动 | 轻微振动 | 轻微振动 | 3864 | 48.32 | 16.18 |
五轴加工设备

五轴叶片加工结果
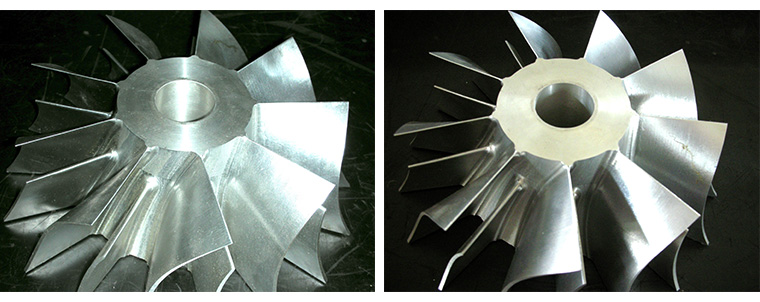
五轴叶片加工结果对比
| 加工工序 | 编程速度 | 振颤情况 现有算法1 |
振颤情况 自主算法 |
加工时间 现有算法1 |
加工时间 自主算法 |
效率提升 |
| r12 | 4.0m/min | 少许颤动 | 无颤动 | 15分30秒 | 12分24秒 | 20.00% |
| r81 | 1.5m/min | 少许颤动 | 无颤动 | 36分00秒 | 28分51秒 | 19.86% |
| r82 | 1.5m/min | 少许颤动 | 无颤动 | 07分50秒 | 06分14秒 | 20.42% |
| dyjx | 4.0m/min | 无颤动 | 无颤动 | 12分07秒 | 11分01秒 | 9.07% |
| xyjx | 4.0m/min | 无颤动 | 无颤动 | 10分36秒 | 7分41秒 | 27.51% |

技术专家
- 讲师简介
- 张晓辉,博士,毕业于中国科学院沈阳计算技术研究所。擅长面向数字化控制系统的运动控制器软件结构设计和高速高精运动控制算法的研发。作为运动控制器和运动控制算法技术骨干先后参与了“高档数控机床与基础制造装备”国家科技重大专项课题:“总线式全数字高档数控装置”、“基于国产‘龙芯’CPU芯片的高档数控装置”、“数控系统高速高精复合控制技术创新平台建设”,以及中国科学院知识创新工程重要方向性项目“基于数学机械化方法的高档数控系统研制”。先后发表论文20余篇,获得授权发明专利10余项。现为宁波海天驱动有限公司运动控制研发部主任,负责海天驱动机器人控制器、通用PMC控制器,以及伺服节能液压专用控制器软硬件平台的全自主研发。






