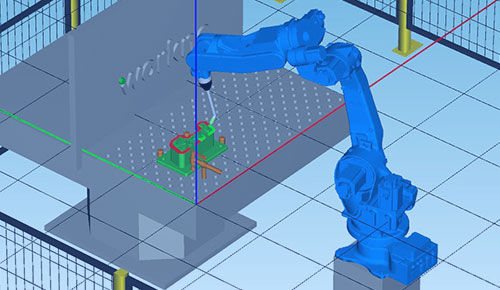

- 第1章 单工业机器人工作站方案仿真流程
- 1-1 负载估计 ( 06:23)
- 1-2 机器人选型 ( 03:46)
- 第2章 离线仿真基础:RRS协议和标定
- 2-1 RRS协议和标定 ( 11:10)

梁兆东
睿慕课学院
- 讲师简介
- 埃夫特智能装备股份有限公司研发中心算法工程师,研究方向:基于模型的机械臂运动控制。2013年7月硕士毕业于哈尔滨工业大学并入职某集团中央研究院,从事运动控制产品的集成应用和工业机器人集成应用,2016年05月入职埃夫特。擅长领域:PMSM交流永磁伺服电机控制原理、单工业机器人工作站的离线仿真等。
- 课程须知
- 具备机器人运动学基础。
- 课程目标
- 了解单工业机器人工作站仿真的基础和注意事项。