

 黄金会员免费
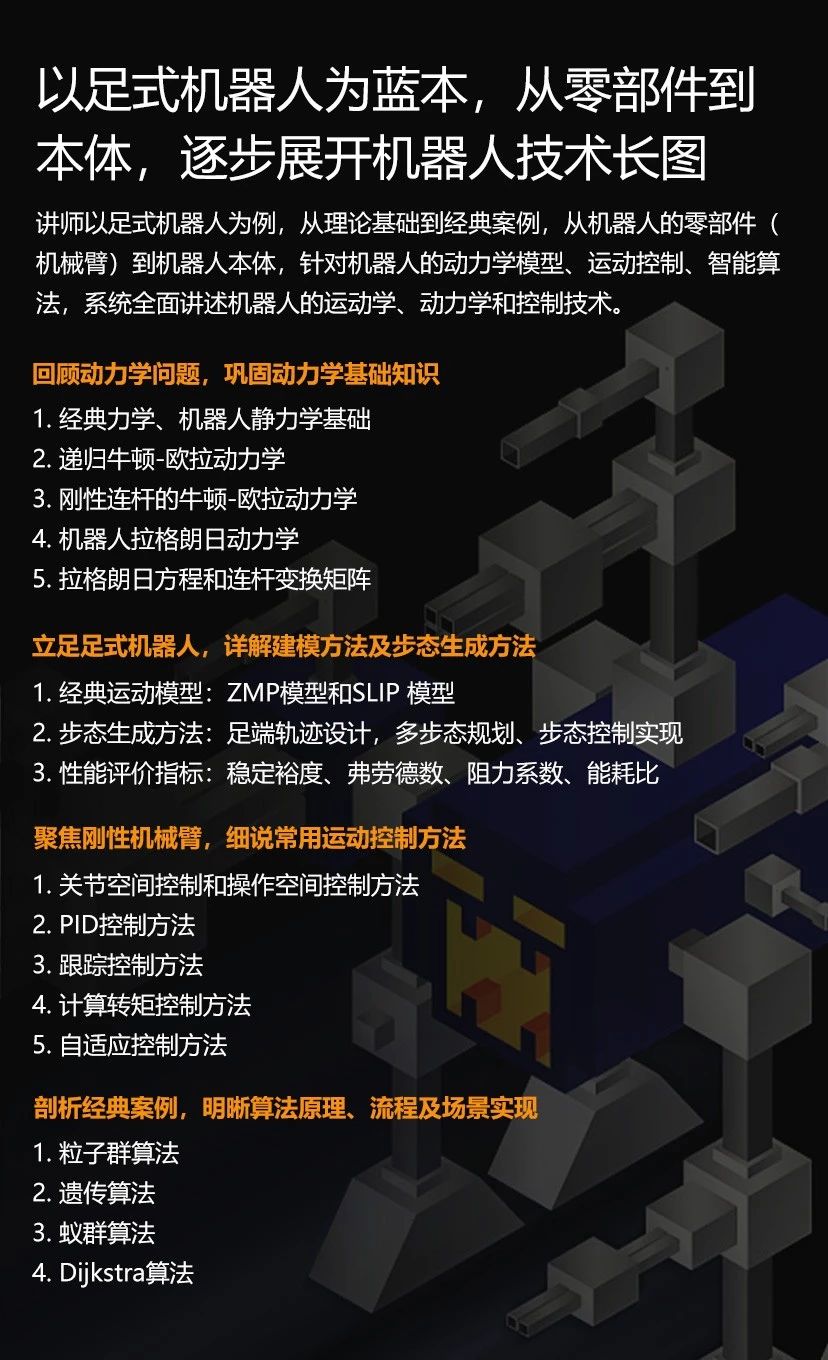
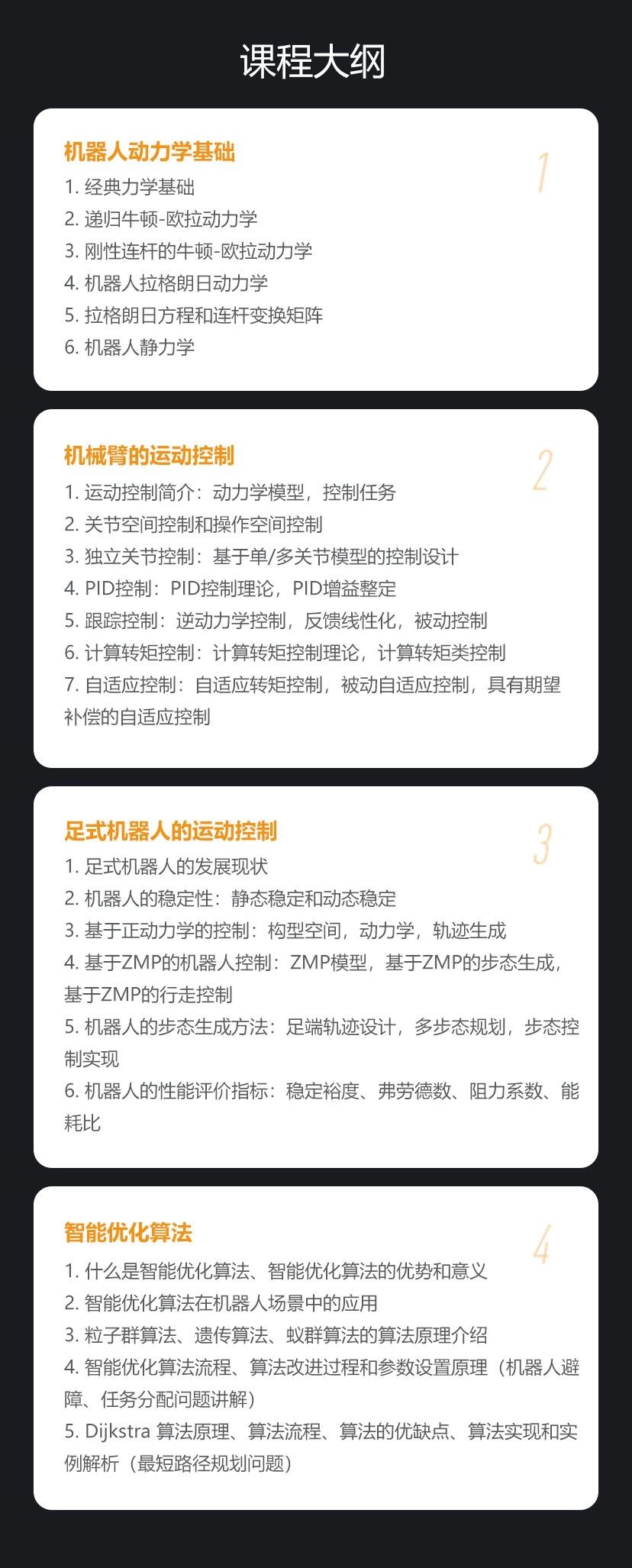
黄金会员免费课程以足式机器人为蓝本,从机器人的零部件—机械臂到机器人本体,针对机器人的动力学模型、运动控制、智能算法,讲述机器人的运动学、动力学和控制技术。

讲师提示

Dr. Wang
高级研究员 香港中文大学
- 讲师简介
- 工学博士,现任香港中文大学(深圳)客座高级研究员,机械工程学会高级会员,人工智能学会智能机器人专业委员会委员。曾在加州大学伯克利分校公派联合培养,研究成果被Nature News,中央电视台等主流国内外媒体报道。
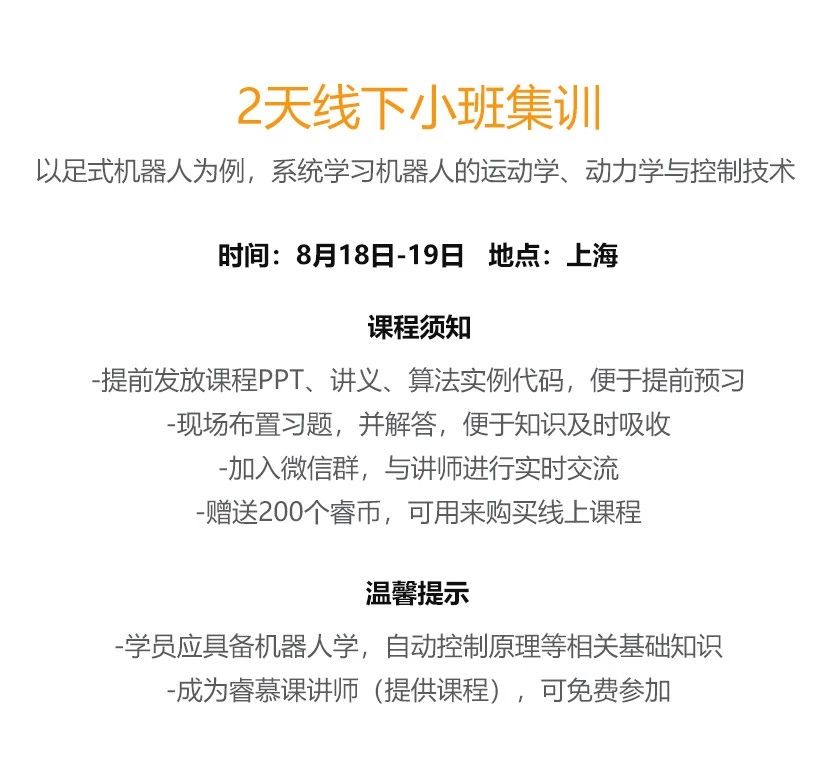
- 课程须知
- 应具备机器人学,自动控制原理等相关基础知识。
- 课程目标
- 1. 深化对机器人运动学和动力学的认识;
2. 掌握机器人的建模方法;
3. 掌握机器人的运动控制方法;
4. 掌握机器人的优化控制算法。






