黄金会员免费
黄金会员免费近年来,研究者致力开发基于深度学习的感知算法,并尝试将其运用到感知与定位任务中,促进两者相互的性能提升。本课程也将介绍其中的前沿思路,帮助大家更好地理解和掌握无人系统中导航与定位的技巧。
本课程从无人系统中的感知任务出发,着重介绍视觉以及激光SLAM的基本原理、框架和主流算法,并比较了二者在理论及实际任务中的异同。
本课程着眼于实践,重点侧重于将理论知识用于开发实战,对一线开发人员和相关技术领域研究人员有着非常重要的参考价值。



讲师提示
Judy
国内某大厂、美国卡耐基梅隆大学博士后
- 讲师简介
- 美国卡耐基梅隆大学博士后,博士毕业于中国科学院沈阳自动化研究所, 具有多年无人驾驶感知系统开发经验,现就职于国内某大厂。曾获得ACM亚洲区域赛银牌。在TIP等期刊和ICRA、IROS、ACC等国际会议上发表多篇论文。
- 课程须知
- 1. 有几何代数基础;
2. 了解无人系统建图与定位的概念;
3. 具备编程基础Python/Pytorch.
- 课程目标
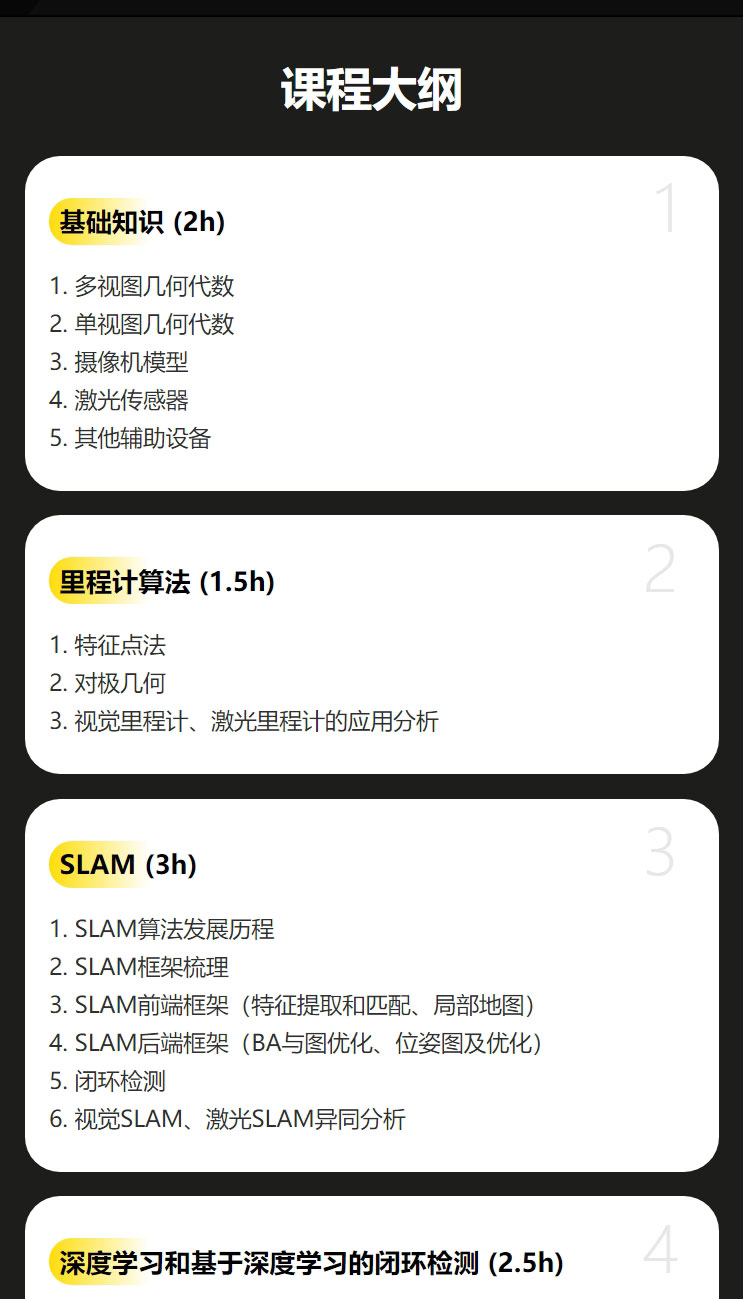
- 1. 了解无人感知系统的原理与框架;
2. 学习SLAM算法的代数基础和基本框架;
3. 了解激光和视觉SLAM算法的异同和应用;
4. 了解SLAM算法和深度学习结合的新研究方向和应用。