机械手——作为机器人的末端执行器(End-Effector),在上身操作和抓取任务过程中起到至关重要的作用。但由于真实人手的高自由度、结构紧凑、复杂等特征,绝大多数机械手都无法完美“复制”人手的功能,其设计和功能都是在某些特定场合和功能要求下的简化和权衡。
作为机械手设计系列文章的开篇,这篇文章将主要谈谈传统的机械手在设计上现有的不足与需要面对的挑战。
1. 高自由度的灵巧性:
我们首先抛开主动控制(Active Control)和被动适应(Passive Compliance)这两种类型的自由度不谈,也抛开全驱动(Fully-actuated)和欠驱动(Under-actuated)这两种自由度的驱动方式不谈,我们先来粗略分析一下真实人手的自由度(Degree of Freedom)。
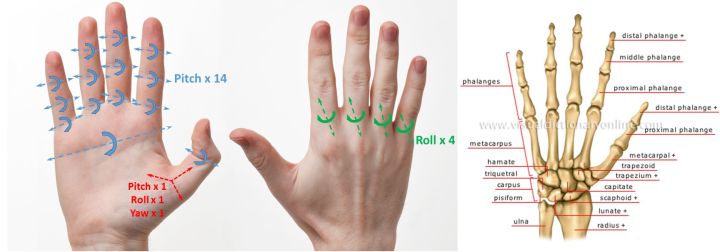
真实人手共有21个自由度 (未包括手腕关节带来的6个自由度)
如果我们定义每根手指闭合屈曲(Flexion)的方向为Pitch,那么:
除大拇指的指根关节(Thumb metac Arpophalangeal Joint)以外:我们有14个Pitch Joint和4个Roll Joint,如上图分布。
如果简单的定义大拇指的指根关节为球关节(Spherical joint),那么我们又得到了3个自由度,总计共14+4+3=21个自由度。(我们这里不统计手腕关节带来的6个自由度)
也许大家对21个自由度没有明确的概念,我们可以做一个对比:一条机械人单腿是6个自由度,一条机械臂一般是7个自由度,21个自由度得需要多么复杂的设计才能实现。
如何应付如此高自由度的机电系统设计,一般有如下两种方向的做法:
减少驱动器的数量,带来了如下按照驱动方式的分类:
1. 全驱动机械手(Fully-Actuated Hand):电机的数量等于所设计自由度的数量;
2. 欠驱动机械手(Under-Actuated Hand):电机的数量小于所设计自由度的数量。
减少冗余手指的数量:保证功能的前提下,手指的数目由3指、4指到5指不等。
关于按照这两个方向做精简优化的不同机械手的特点、性能比较以及未来发展趋势,我会之后独立写一篇文章来详细比较。整体来说,按照目前学术界技术发展的整体水平:
我们目前还是无法在紧凑、高效、与可靠性的前提下完美“复制”人手高自由度的灵巧性。
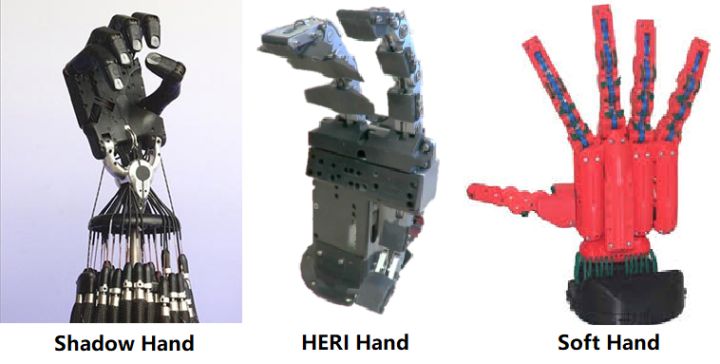
一些机械手举例:Shadow Hand:全驱动机械手; HERI Hand&Soft Hand:欠驱动机械手(3指和5指)
2. 高抓重比的鲁棒性:
抓重比(Grasping-Weight-Ratio):指的是机械手垂直抓握物体的重量和机械手本身重量的比例,是一个比较好的衡量机械手鲁棒性(Robustness)的指标。
为什么我们这里要提和自身重量的比例?
因为很多机械手在设计的时候,根本没有考虑到和实际人形机器人集成(Integrated)的问题。具体来说,很多全驱动机械手的重量在4-5kg左右,当你集成在固定基座的机械臂上时,可能还看不出太大弊端,但如果是集成在双足机器人(Biped)上,这个重量的机械手对于步行(Locomotion)和操作(Manipulation)的控制简直就是灾难。
人手的抓重比:
人手的重量一般是人体体重的0.58%左右,假设一个70kg的成年人,他手的质量大约为406g。只要你是正常人,你应该毫无问题垂直抓握住一个5kg的哑铃,这个情景下机械手的抓重比已经达到12.3。而实际人类的抓握能力应该是数倍高于12.3这个数值。
机械手的抓重比:
一只能与仿人机器人集成的机械手,垂直抓重比能够达到2.5以上已经算是很好的性能了,差距可见一斑。(垂直抓握物体,物体的重力仅由抓取力产生的摩擦力平衡)
我这里没有提用握力计这个直观的指标来衡量机械手鲁棒性的原因其实很简单:我目前没有看到过,使用握力计来测量机械手握力的实验,因为结构设计的缺陷与鲁棒性本身的不足,机械手没有办法很好使用握力计,很多人都在心照不宣回避这个实验。(如果有,请告诉我)

图为某机械手做抓重比实验:2.716(实际抓重比)
3. 全覆盖高灵敏度的传感性:
说到传感的特征,这个方面实际人手应该甩机械手的应用与发展几十条街。目前当我们谈到机械手的传感反馈的时候,我们仅仅是在谈论:
1. 手指位置反馈:通过位置传感器实现;
2. 手指力反馈:一般通过触觉传感器或者驱动电机电流环反馈实现;
3. 手指温度反馈:通过热敏电阻实现。(实际机械手一般很少应用到)
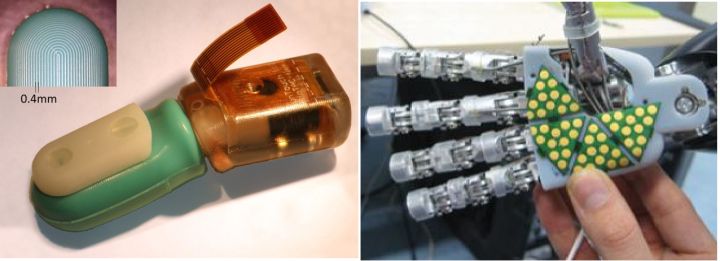
左图:来自BioTac®的指尖模块,能够测量压力和温度;右图:来自icub的手掌tactile sensor
而真实的人手实际上是具有知觉的(Tactile Perception),我们可以通过简单的触摸,来分别物体的软硬、光滑等质感层面的信息,这其实是一项很神奇的能力。
我在去年IROS的时候听过一个介绍人手触觉质感反馈的Workshop (Vincent Hayward, ISIR, France)。简而言之,他们做了很深入的研究,但是目前还并没有从本质上分析出来人手是如何通过触觉质感(Tactile Perception)来分辨玻璃和金属的!
来回到之前提到的三点常规传感器反馈,也还是存在如下的一些问题:
1. 无法做到机械手全尺寸覆盖传感器,现有的仅仅是覆盖手掌和指腹等重要抓取位置;
2. 绝大多数触觉传感器是一维力(仅垂直压力)的测量;
3. 绝大多数触觉传感器在提供施加力位置(Location)信息时分辨率太低;
4. 传感器相应的测量电路集成紧凑性太差。
4. 传动的可靠与机构的环境顺从性:
关于机械手在人形机器人的实际应用情况,简而言之就是:硬件特别特别容易损坏,一只手绝大部分时间都是处在修理过程中。而硬件上的损坏则主要体现在如下两点:
1. 机械传动装置损坏;
2. 缺乏良好的环境顺从机构(Compliant Structure)造成的结构损坏。
关于机械手的机械传动(Mechanical Transmission),通常有如下的方式:
1.齿轮传动;2. 连杆传动; 3. 肌腱传动; 4. 材料形变。
关于每种机械传动方式的特点、设计特征、优缺点以及未来发展趋势,之后我会写专门的文章来详细介绍分析。
以上提到的每种传动方式,尤其是最近使用较多的肌腱(Tendon)传动,其在大负载抓握下传动的可靠性以及使用寿命(Fatigue Test),都和实际的人手有很大的差距。退一步说,机械手传动的可靠性在整体人形机器人系统中是木桶效应的那块短板,和关节驱动器的传动方式相比(齿轮、四连杆以及带传动等)都要逊色很多。
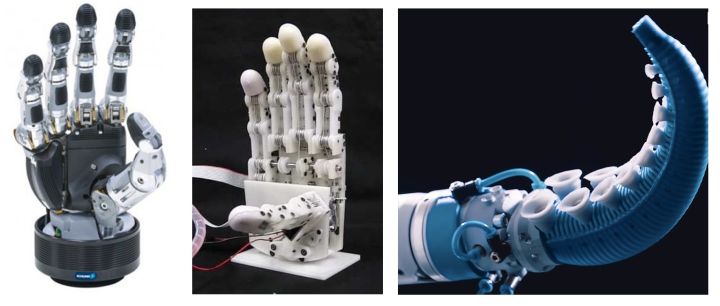
SVH Hand: 齿轮、连杆传动;Ritsumeikan Hand: 肌腱传动;Festo OctopusGrabber: 材料形变
关于机械手的顺从性(Compliance):
实际上,不同驱动原理的机械手在顺从性上差异巨大。一般而言,基于欠驱动和材料形变的机械手在顺从性上要远远优于全驱动机械手,目前大多数的全驱动机械手无法实现手指关节的Impedance Control,所以在面对外界复杂环境的碰撞和冲击时,非常容易损坏关节电机和减速箱。而基于欠驱动和材料形变的机械手虽然在顺从性上有出色的表现,但不可否认的是,这类顺从性能的获得是建立于牺牲高自由度灵巧性和鲁棒性之上的。
5. 机电系统的高度集成性:
由于机械手的高自由度特性,机械层面上大量关节轴承支撑结构、传动装置的设计;电气层面上大量驱动电机、传感器以及相应驱动电路的应用,对于整体机电系统的集成性是一个很大的挑战。
如下图,我们可以参看一些早期的全驱动机械手的例子,手部的设计确实很干净整洁,但实际上都是冰山一角:底部红色虚线区域内排布了大量的电机、机械传动结构和驱动电路。这样集成度的设计是几乎不可能真正应用到的人形机器人(Biped)上的。
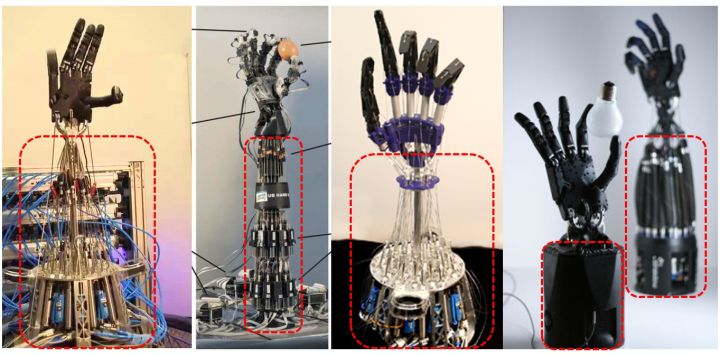
欠缺高集成性的全驱动机械手,难以实际在人形机器人(Biped)上使用
欠驱动机械手在集成性方面具有优势。原因也很简单:驱动器自由度(Degree of Actuator)的降低和冗余手指数量的减少,极大程度降低了系统的冗余性(Redundancy)。
下图是一个欠驱动机械手机电系统集成的例子:机械手本体上完全集成了驱动电机和电路,由于高系统的集成性也进而带来了对于不同机械臂的通用性。具体来说,上端机械臂只要提供电气和机械端的接口,无需任何机械臂本体结构上的改变,高集成性的机械手就能直接安装连接并使用。

具有较高集成性的欠驱动机械手设计——以HERI Hand为例
这里需要承认的是,欠驱动机械手的高集成性一定程度上也是牺牲高自由度性能下的结果,但在现有的技术条件下,减少冗余的手指数量和驱动器数量是提高系统集成度最有效的手段。
机械手作为仿人机器人设计中最为复杂、精巧的一环,很多设计所做的决定都是在现有的技术条件下,牺牲某方面的性能而提升另一方面性能的权衡。后续的文章会具体介绍相应的设计细节,本文作为开篇,主要介绍了目前人形机器人的机械手设计需要面对的问题和挑战。
这类某一方向整体发展Review的文章本身是需要大佬来写,所以还是得谦虚地说一句:班门弄斧了。
Reference
1. Z. Ren, C. Zhou, S. Xin, and N. Tsagarakis,“HERI Hand: A Quasi Dexterous and Powerful Hand with Asymmetrical Finger Dimensions and Under Actuation,” in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017, pp. 322–328.
2. Catalano, Manuel G., Giorgio Grioli, Edoardo Farnioli, Alessandro Serio, Cristina Piazza, and Antonio Bicchi. "Adaptive synergies for the design and control of the Pisa/IIT SoftHand." The International Journal of Robotics Research (IJRR) 33, no. 5 (2014): 768-782.
3. Grebenstein, Markus, Maxime Chalon, Gerd Hirzinger, and Roland Siegwart. "Antagonistically driven finger design for the anthropomorphic DLR hand arm system." In Humanoid Robots (Humanoids), 2010 10th IEEE-RAS International Conference on, pp. 609-616. IEEE, 2010.
4. Mitsui, Kazuki, Ryuta Ozawa, and Toshiyuki Kou. "An under-actuated robotic hand for multiple grasps." In Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ International Conference on, pp. 5475-5480. IEEE, 2013.
本文转载自知乎,作者:任赜宇,如若转载请联系原作者。