这篇文章介绍一下SEA驱动器中:
1. 线性动力学模型及其简化(Linear Dynamics Model and its Simplification);
2. 力矩求导(Torque Derivation)
这两块的内容是后续分析SEA弹性体刚度选择(Stiffness Selection)和相关SEA力矩控制(Torque Control)响应及性能的基础。因为SEA已经出现了将近20年,所以线性动力学模型和相关力矩求导都是经典内容——Nothing Special.
我希望通过我的解释,能够让之前没有了解过SEA的伙伴们快速入门。
阅读提示(线性动力学模型Eq. 7,Eq. 8重要,力矩求导Eq. 13重要,结论性公式)
线性动力学模型:
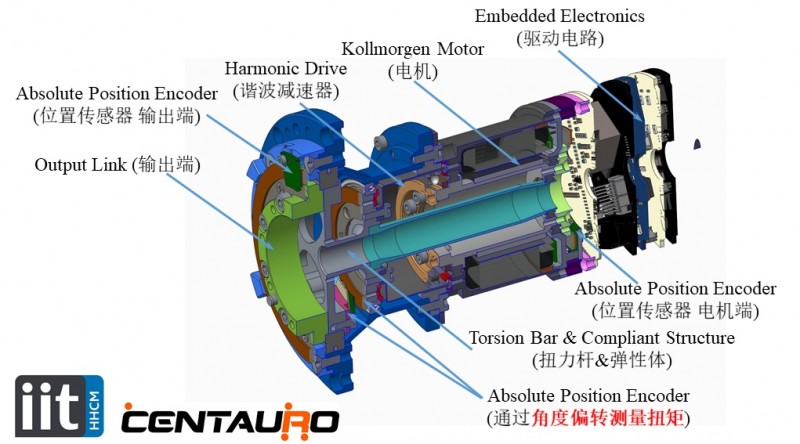
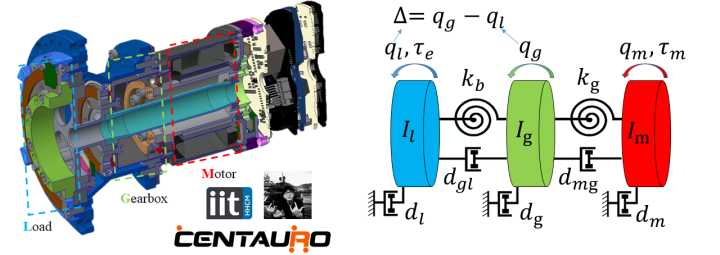
上图展示了SEA驱动器的实际物理结构(左图),我着重圈出了三个方块:
红色方块: 电机转子(Motor Rotor)
绿色方块:减速箱(Gearbox)
蓝色方块:输出端(Load),其中减速箱端与输出端串联关键的弹性体
对应的物理模型如上右图所示:红色(Motor)---绿色(Gearbox)---输出端(Load)
其中:
Im: 电机转子惯量; Ig: 齿轮箱惯量; II: 输出端惯量;
kg, dmg: 电机端与齿轮箱端,弹簧阻尼系统的刚度与内部阻尼;
kb, dgl: 齿轮箱端与输出箱端,弹簧阻尼系统的刚度与内部阻尼;
qm, qg, ql: 电机端,齿轮箱端,输出端绝对位置;
τm、τe: 电机端输出扭矩(电机线圈产生),输出端扭矩(与外部环境交互产生);
dm, dg, dl: 电机、齿轮箱与输出端与驱动器外壳间的粘滞阻尼;
Δ=qg-ql: 输出端与齿轮箱端绝对位置偏角(重要参数)
线性动力学的模型的核心其实就是各个模块上的扭矩平衡,如下:
电机端扭矩平衡Eq. 1:
![]()
齿轮箱端扭矩平衡Eq. 2:
![]()
输出端扭矩平衡Eq. 3:
![]()
这里还需要提及到的是在Eq. 3中的最后两项可以写成如下的形式Eq. 4 (重要!):
![]()
注意:这里的τ是和之前的定义的 τe 是有区别的,τ在这里是齿轮箱向输出端传递的力矩。当处于输出平衡状态时,有如下等式Eq. 5:
工程经验:即使在输出端环节,τ,τe 也是相差一个 dlql ,这里的dl是输出端与驱动器外壳的粘滞系数,与机械设计环节轴孔支撑的公差与装配手艺有重要的关系。
模型简化:
首先对于Eq. 4可以简化为Eq. 6:
(一般齿轮箱与输出端的弹性体都是金属材料,其阻尼系数可以忽略不计,即 mso-bidi-theme-font:minor-bidi;mso-ansi-language:EN-US;mso-fareast-language: ZH-CN;mso-bidi-language:AR-SA">dgl mso-ansi-language:EN-US;mso-fareast-language:ZH-CN;mso-bidi-language:AR-SA">≈ mso-bidi-theme-font:minor-bidi;mso-ansi-language:EN-US;mso-fareast-language: ZH-CN;mso-bidi-language:AR-SA">0 )
![]()
对于大部分SEA驱动器而言,谐波减速器的刚度都远远大于柔性传动元件,因此我们可以将谐波减速器考虑成刚体(Rigid Body),即:
所以对于Eq. 1与Eq. 2我们可以简化成如下Eq. 7 (重要!):

对于Eq. 3可以改写成如下Eq. 8:

力矩求导:
这部分内容中通过拉普拉斯变换与一系列数学推导,我们将试图得到在频域下:
输出量 τ(s) 与输入量 τ*(s), ql(s) 之间的关系
τ(s):频域下实际输出扭矩——电机端传递到输出端;
τ*(s):频域下目标扭矩;
ql(s):频域下输出端绝对位置;
以上即为处理公式Eq. 7的数学目标。
1. 处理 qm(s)
首先,对线性动力学模型得到的Eq. 7进行拉普拉斯变换,并代入 qm(s)-ql(s):=Δ(s) 进行改写,我们得到Eq. 9:

我们仔细观察Eq. 9, 通过qm(s)-ql(s):=Δ(s) 的代入,我们已经消除了qm(s)这个电机端的位置变量,下一步要做的就是处理τm(s) 这个电机端的输出力矩。
2. 处理 τm(s)
假设我们使用了一种如下形式的反馈控制器,
这种控制器是用来测量角度偏转Δ , 并且假设前馈控制为λ(s),那么我们得到如下Eq .10:

将Eq .10代入Eq. 9, 我们将得到Eq. 11:
![]()
这里,我们看到Eq. 11中,我们要的τ*(s), ql(s)都已经在等号右边出现。
3. 处理 τ(s)
我们从Eq. 4可以知道 τ(s) =(kb+dgls)Δ(s) ,将其代入Eq. 11的等号左边,我们得到Eq.12:
![]()
4. 整理
将Eq. 12整理如下得到Eq. 13:
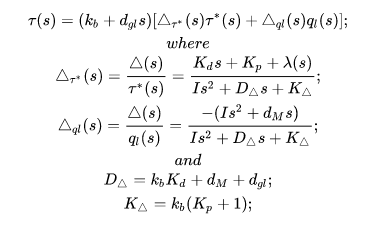
Eq. 13算是SEA的力矩求导下,通过拉普拉斯变换结论性的公式,如果不需要知道相应的推导过程,可以直接拿去使用。其对于分析SEA驱动器的力控性能至关重要——包括透明度(Transparency)和力矩追踪能力(Torque Tracking).
(所有的公式都是我在知乎网页上Latex一个一个敲出来的,不保证全部正确。如果真的有小伙伴能够看完所有公式,给我纠正出错误,我非常开心和感激!)
对于SEA驱动器硬件结构不是很了解的小伙伴,附上我以前写过的介绍链接:
1. 一种带力矩、位置传感器的紧凑人型机器人SEA驱动器(带谐波减速器)机械设计方案。
2. Strain Gauge or Encoder based? 关于SEA力矩测量原理选择的浅谈。
参考文献:
1. Roozing, Wesley, Jörn Malzahn, Navvab Kashiri, Darwin G. Caldwell, and Nikos G. Tsagarakis. "On the Stiffness Selection for Torque-Controlled Series-Elastic Actuators." IEEE Robotics and Automation Letters 2, no. 4 (2017): 2255-2262.
2. Pratt, Gill A., and Matthew M. Williamson. "Series elastic actuators." In Intelligent Robots and Systems 95.'Human Robot Interaction and Cooperative Robots', Proceedings. 1995 IEEE/RSJ International Conference on, vol. 1, pp. 399-406. IEEE, 1995.
本文转载自知乎,作者:任赜宇,如若转载请联系原作者。